Robotocists from Osaka University and researchers from the University College London have developed a new remotely operated robotic system capable of assisting humans, specifically in unfriendly environments. This work builds upon recovery efforts that took place after the 2013 Fukushima nuclear power plant where remotely controlled robots were used to perform emergency tasks since the region was too dangerous for humans to venture into.
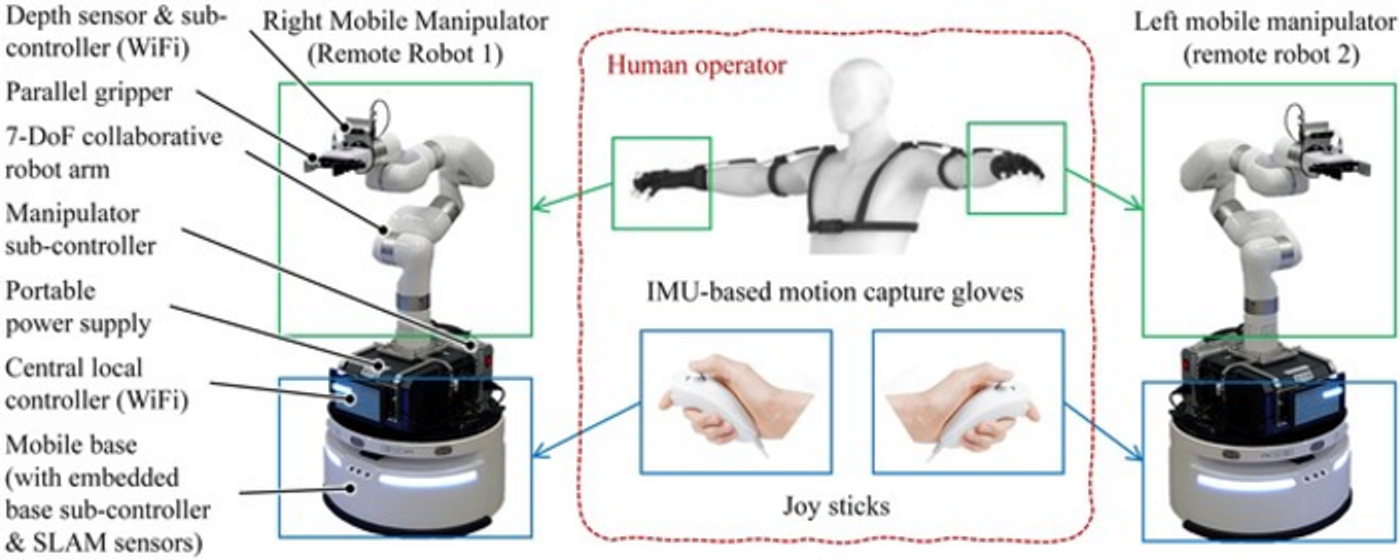
The remotely operated robotic system developed for this study. (Image Credit: Cyborg and Bionic Systems)
“The research interest in remote control has been further signified in the past 2 years as the coronavirus disease 2019 (COVID-19) pandemic restricted people’s movement,” said Dr. Weiwei Wan, who is an associate professor in the Graduate School of Engineering at Osaka University, and a co-author on the study. “A series of robots were developed and remotely deployed at the Wuhan hospitals to assist doctors and patients.”
Previous studies regarding remotely controlled robots only possessed one mobile base with one or two robotic arms mounted to the base, but this new study features two independent mobile bases. Each base mounted to its own manipulator and each only requires one hand to control it. The operation of the assembly mimics human hand movements in that both manipulators work cooperatively.
“The proposed idea of incorporating two independently movable manipulators for motion-tracking-based teleoperation is intriguing. However, there are some inherent issues to be addressed,” said Dr. Wan, “First of all, how to map the postures of the human teleoperator’s two arms to the corresponding manipulator’s poses. In addition, how to avoid it when under some circumstances, the manipulator may collide with itself. Moreover, how to remotely monitor the two manipulators with the large operating range.”
For the study, the researchers used only one manipulator to both pick up a coffee mug and hand it over, much like a human would do. The team also found the two mobile manipulators can work together to both pick and place long sticks, as well.
Going forward, the team looks to address matching the operator’s arm direction, a more flexible joystick, reduce errors of coordination between both manipulators, and giving feedback to the operator in a far away and unseen environment.
What new discoveries will scientists make in the field of robotics and tele-robotics in the coming years and decades? Only time will tell, and this is why we science!
Sources: Cyborg and Bionic Systems, EurekAlert!
As always, keep doing science & keep looking up!